Point cloud classification assigns semantic labels to individual points, answering the question: “What is this point part of?” Ground, building, vehicle, vegetation, or dozens of other classes depending on the application.
Classification vs. Segmentation
Classification (Semantic Labeling)
Assigns a class label to each point independently. Points sharing a class may belong to different objects.
Instance Segmentation
Groups points belonging to the same object instance, identifying distinct objects not just categories.
Semantic Segmentation
Combines both: assigns class labels AND groups into meaningful regions.
Traditional Classification Methods
Before deep learning, classification relied on handcrafted features and traditional machine learning.
Classification in Practice
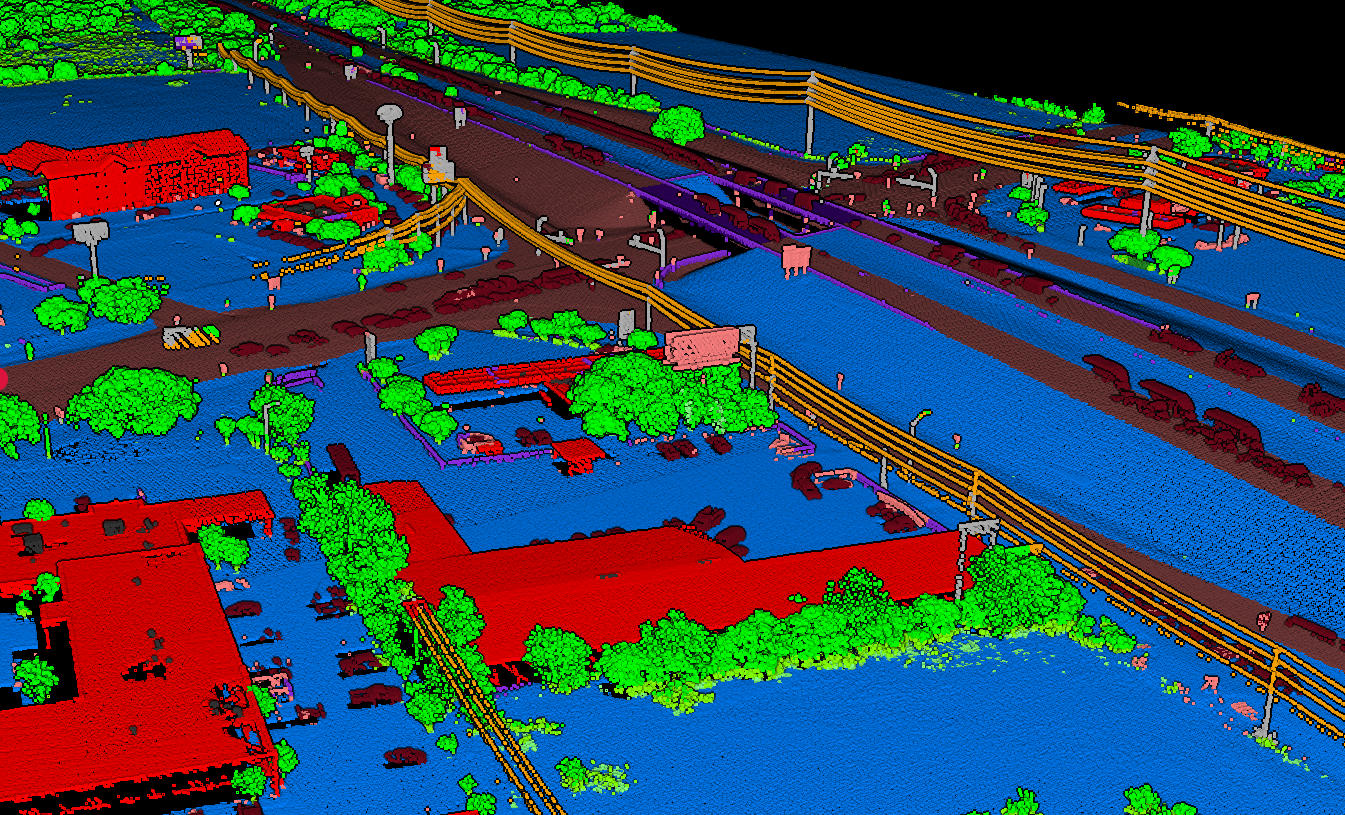
Modern classification algorithms can distinguish between dozens of feature classes in complex environments. Agricultural surveys separate crops, hedgerows, buildings, and infrastructure automatically.
Key challenges include:
- Class imbalance — Ground points vastly outnumber buildings
- Edge cases — Vegetation touching buildings, bridges over roads
- Point density variation — Sparse vs. dense areas in same scan
Deep Learning Architectures
PointNet (2017)
Revolutionized the field by processing raw point clouds directly. Uses symmetric functions (max pooling) to handle point order invariance.
PointNet++
Extended PointNet with hierarchical feature learning through Set Abstraction layers and multi-scale grouping.
KPConv
Kernel Point Convolution uses learnable kernel points for true convolution on point clouds. State-of-the-art accuracy.
DGCNN
Dynamic Graph CNN constructs k-NN graphs dynamically at each layer with EdgeConv aggregating edge features.
Point Transformer
Applies self-attention to point clouds, learning point relationships globally. Top benchmark results.
RandLA-Net
Uses random sampling for efficiency. Processes 1 million points in one pass. Designed for large-scale data.
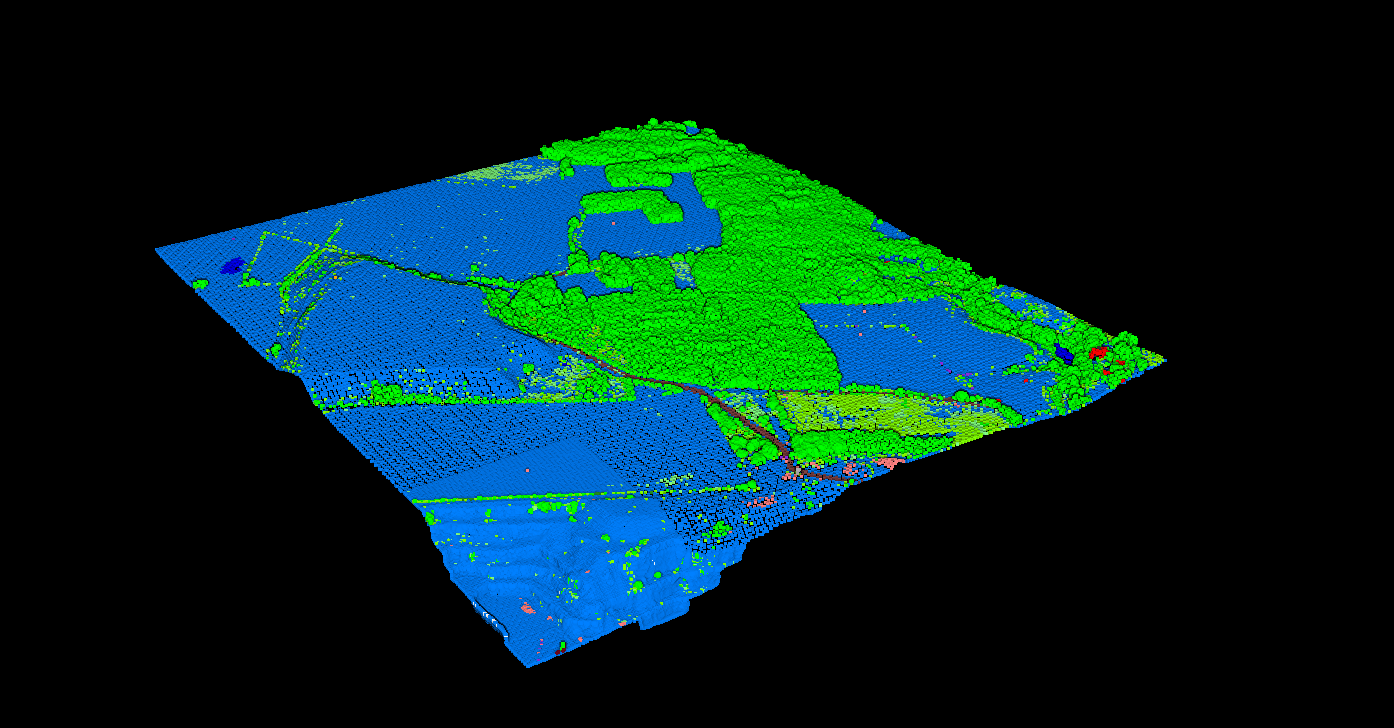
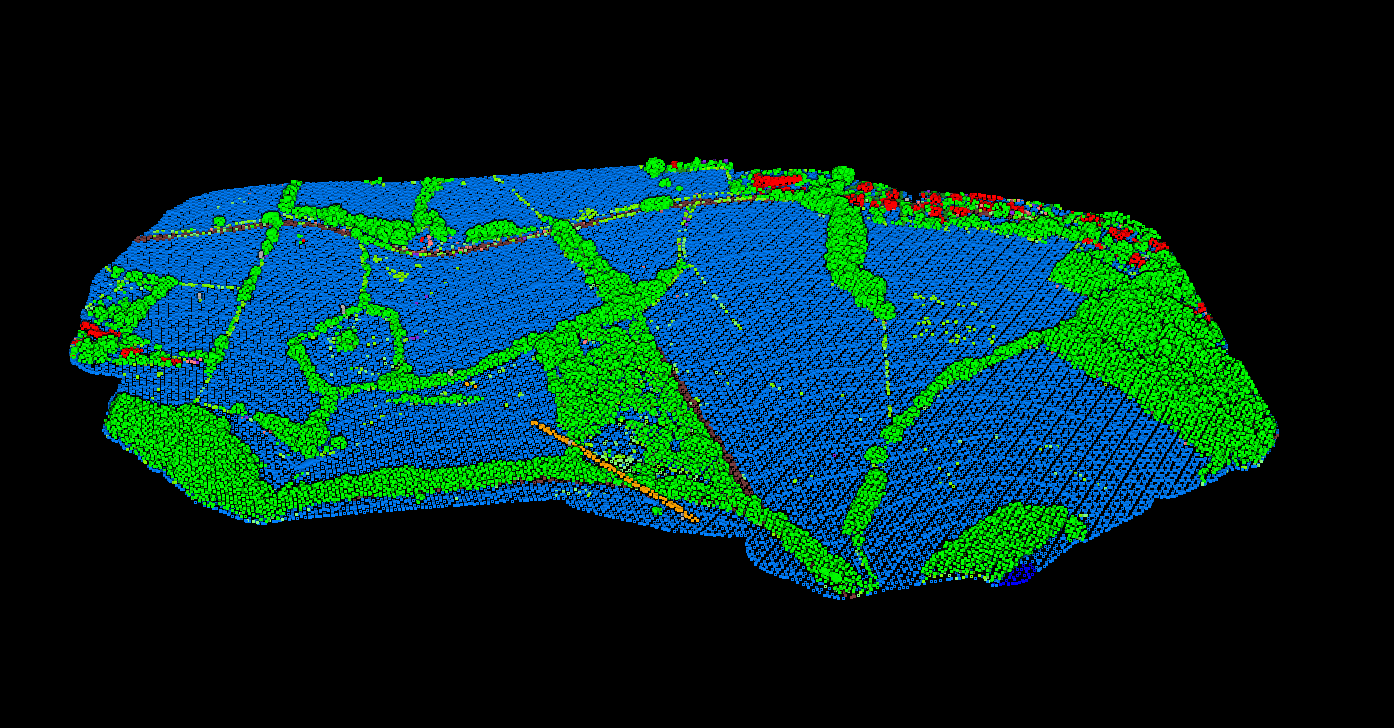
Forestry & Environmental Classification
Forestry applications benefit immensely from accurate classification:
- Ground vs. vegetation separation for DTM generation
- Canopy height models from classified returns
- Individual tree detection and species classification
- Understory mapping through multi-return analysis
AI-powered classification handles the complexity of mixed forest environments where pure manual classification would be impractical. For edge cases, Lidarvisor includes built-in manual tools (brush selection, class permutation, filtering) to refine AI results.
Applications
Frequently Asked Questions
There is no universal best — it depends on data characteristics, computational resources, and accuracy requirements. For benchmarks, Point Transformer and KPConv lead. For efficiency, RandLA-Net excels. For limited data, traditional Random Forest remains effective.
Deep learning typically requires thousands of labeled examples per class. Transfer learning from pre-trained models can reduce requirements. Traditional ML needs less data but more feature engineering.
Use weighted loss functions, oversample minority classes, or use focal loss which emphasizes hard examples. Evaluation should focus on per-class metrics (IoU, F1) rather than overall accuracy.
Related Articles
Classify Your Point Clouds Automatically
LidarVisor uses AI-powered classification to automatically label ground, vegetation, buildings, and more. Upload your LAS/LAZ files and get classified data ready for analysis.