Get Production-Ready Results in Minutes, Not Hours
Lidarvisor vs CloudCompare
Manual point cloud classification takes hours and requires specialized expertise. What if you could get ASPRS-standard results in minutes, with zero parameter tuning? Compare Lidarvisor’s AI automation against CloudCompare’s powerful manual tools.
Quick Comparison
What is Lidarvisor?
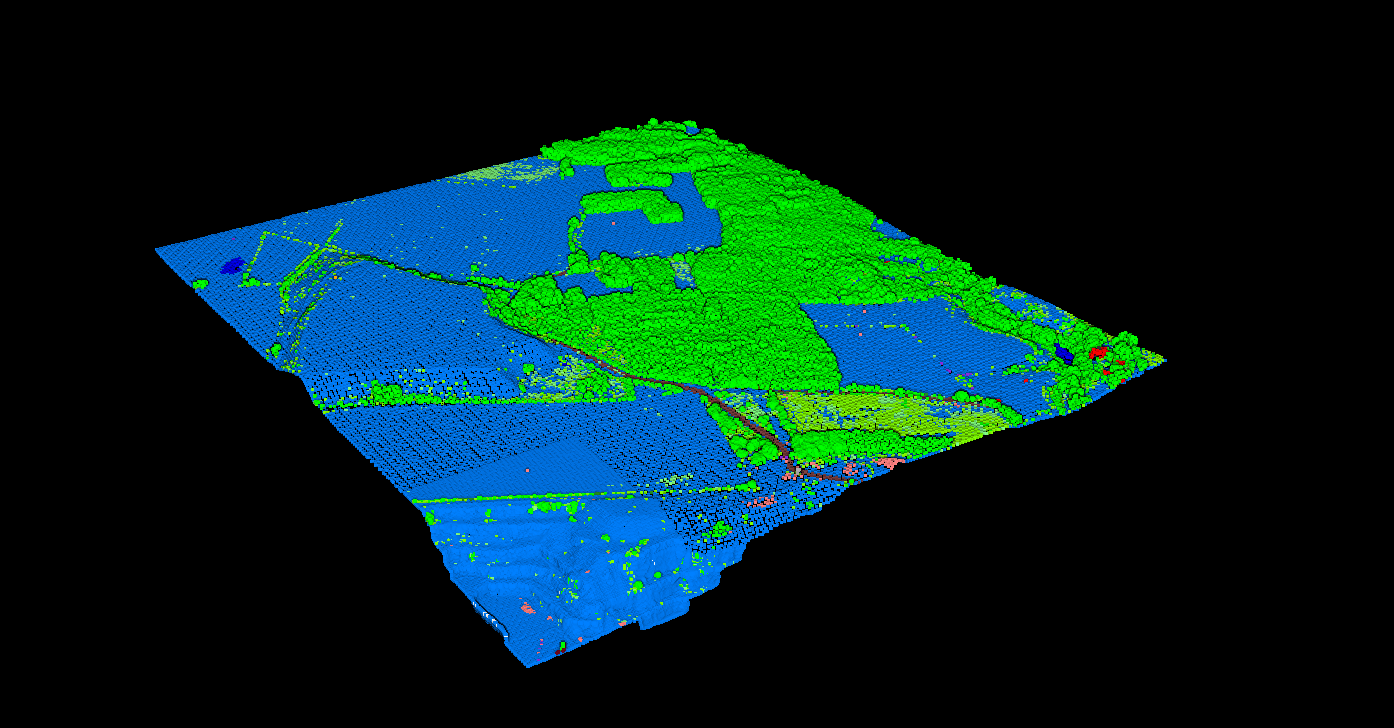
Lidarvisor is a cloud-based LiDAR processing platform designed for production workflows. Upload your LAS or LAZ file, and the AI automatically classifies points into 12 ASPRS-standard classes: ground, vegetation (low/medium/high), buildings, water, wires, towers, poles, vehicles, bridge decks, and fences. No parameter tuning required.
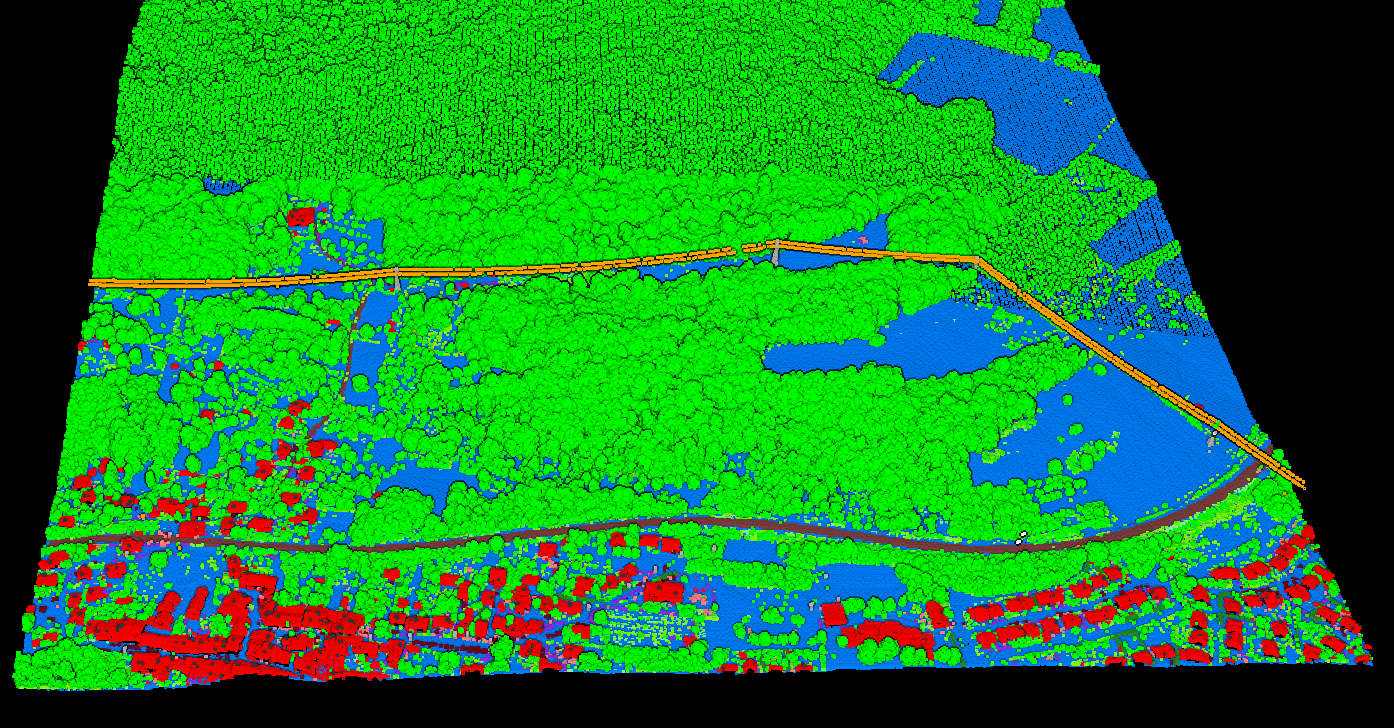
Lidarvisor classifies utility corridors including wires, poles, and vegetation for UVM workflows.
What is CloudCompare?
CloudCompare is a free, open-source 3D point cloud processing application. Originally developed at Telecom ParisTech and EDF in 2003 for change detection in industrial facilities, it has evolved into a comprehensive point cloud editing toolkit used by researchers, engineers, and hobbyists worldwide.
Key capabilities:
- Point cloud registration (ICP algorithm)
- Cloud-to-cloud and cloud-to-mesh distance computation
- Rasterize tool for DTM, DSM, hillshade, contours
- CSF plugin for automatic ground classification
- Geometric features (curvature, roughness, density)
- 20+ plugin ecosystem for extended functionality
Strengths:
- Completely free, forever
- Handles E57, PTX, and scanner-specific formats
- Powerful for custom analysis workflows
- Active open-source community
- Full control over every parameter
When to Use Each
Choose CloudCompare
- Research and experimentation: Custom analysis, testing algorithms, academic work
- Scan registration: Aligning multiple scans with ICP
- Distance analysis: Cloud-to-cloud or cloud-to-mesh comparison
- Zero budget: When free software is a hard requirement
- Terrestrial LiDAR: TLS or mobile scanning workflows
- Custom formats: E57, PTX, scanner-specific files
Choose Lidarvisor
- Production speed: Fast turnaround on aerial LiDAR classification
- Consistent deliverables: DTM, DSM, contours, footprints every time
- Non-specialist users: Team members who are not point cloud experts
- Client sharing: Browser-based viewer with shareable links
- Forestry and utility work: Pre-built reports for tree inventory and vegetation risk
- CAD deliverables: Direct DXF export with organized layers
- Manual refinement: Built-in brush selection, class permutation, and filtering
Using Both Together
Many professionals use both tools in their workflow:
1
Pre-process
Merge scans, remove noise in CloudCompare
2
Classify
Upload to Lidarvisor for AI classification
3
Refine
Use Lidarvisor’s manual tools (brush, filtering, class permutation) or CloudCompare
4
Deliver
Generate DTM, contours, reports from Lidarvisor